The goal of this project was to explore procedural locomotion through variations in limb count,
while designing a creature that exists in the uncanny valley between organic and robotic forms,
as well as between cuteness and repulsion.
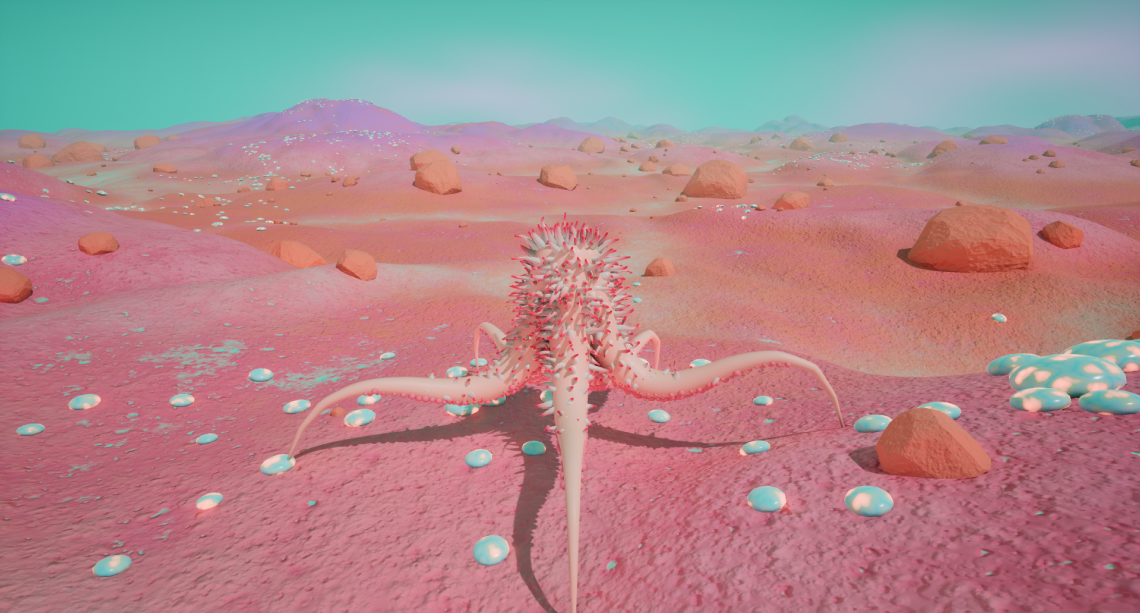
The cephalo creature appears to have human skin–like textures that suggest familiarity or friendliness. In contrast, its multiple legs recall cephalopods, and sharp spikes introduce visual cues associated with danger and venom.
The experiment eventually evolved into a walking simulator featuring a five-legged cephalo creature navigating an alien landscape. The environment is shaped around the body proportions and movement capabilities of the cephalo, supporting locomotion across rocks and small hills.
The cephalo creature appears to have human skin–like textures that suggest familiarity or friendliness. In contrast, its multiple legs recall cephalopods, and sharp spikes introduce visual cues associated with danger and venom.
The experiment eventually evolved into a walking simulator featuring a five-legged cephalo creature navigating an alien landscape. The environment is shaped around the body proportions and movement capabilities of the cephalo, supporting locomotion across rocks and small hills.